一、 項(xiàng)目背景:
該項(xiàng)目為已經(jīng)對(duì)印染完成的標(biāo)簽,通過(guò)收放卷進(jìn)行展開(kāi),并依次通過(guò)視覺(jué)檢測(cè),通過(guò)配合上位機(jī)檢測(cè)對(duì)印染不良品進(jìn)行精準(zhǔn)停留在工作臺(tái)上,以方便人為進(jìn)行替換不良品,在進(jìn)行收卷成型的設(shè)備
二、 項(xiàng)目要求:
收放卷:材料恒張力,無(wú)外部卷經(jīng)擺臂等檢測(cè)機(jī)構(gòu),通過(guò)錐度實(shí)現(xiàn)張力恒定控制,要求收放卷材料運(yùn)行不抖動(dòng),不拉伸
定位精準(zhǔn):與視覺(jué)系統(tǒng)上位機(jī)采用Tcp通訊方式,對(duì)視覺(jué)系統(tǒng)檢測(cè)出的不良品信號(hào),對(duì)其進(jìn)行精準(zhǔn)位置分析,保證不良品可以準(zhǔn)確停留在人工操作臺(tái)上,以方便人為進(jìn)行替換處理
三、 硬件配置:
匯川設(shè)備:
|
序號(hào)
|
產(chǎn)品名稱(chēng)
|
型號(hào)
|
備注
|
數(shù)量
|
|
1
|
HMI
|
IT6070E
|
人機(jī)界面
|
1
|
|
2
|
PLC
|
H3U-3232MT
|
控制器
|
1
|
|
4
|
伺服電機(jī)
|
ISMH1-75B30CB-U231Z
|
750W電機(jī)
|
5
|
|
5
|
伺服驅(qū)動(dòng)器
|
IS620PS5R5I-IAB-C
|
750W驅(qū)動(dòng)
|
5
|
四、 方案拓?fù)?/span>:
 拓?fù)鋱D.jpg)
五、 方案說(shuō)明:
采用Canlink方式通訊伺服,采用Tcp通訊觸摸屏+視覺(jué)檢測(cè)信號(hào)
(一)方案優(yōu)點(diǎn):
1、 采用匯川Canlink通訊伺服,速率傳輸可達(dá)1M,節(jié)省了傳統(tǒng)方式的接線,并且Canlink通訊方式給予485數(shù)據(jù)交互定義,對(duì)于伺服的參數(shù)讀取以及調(diào)試方面更為方便
2、 采用Tcp進(jìn)行通訊觸摸屏+視覺(jué)數(shù)據(jù)讀取,Tcp采用自適應(yīng)速率最高可達(dá)10M,且采用Tcp方式的控制模式下節(jié)省接線。
(二)現(xiàn)場(chǎng)難點(diǎn)問(wèn)題及解決方案說(shuō)明:
1、 關(guān)于恒定張力設(shè)定問(wèn)題
由于該現(xiàn)場(chǎng)針對(duì)收放卷的控制方式為轉(zhuǎn)矩模式控制,且收放卷的卷經(jīng)變化比較大,所以對(duì)于設(shè)定轉(zhuǎn)矩變化對(duì)于收卷隨著卷經(jīng)變大應(yīng)該加大,對(duì)于放卷則相反,所以對(duì)于錐度的轉(zhuǎn)矩變化比例需要在程序進(jìn)行對(duì)已知牽引的情況下通過(guò)NπD公式,求得收放卷的D,結(jié)合實(shí)際情況進(jìn)行對(duì)設(shè)定轉(zhuǎn)矩的疊加處理
2、 關(guān)于與上位機(jī)的地址幀格式交互說(shuō)明
由于與視覺(jué)系統(tǒng)的配合工作為采用Tcp通訊格式,對(duì)于上位機(jī)支持標(biāo)準(zhǔn)的Modbus Tcp通訊幀格式,所以需要對(duì)PLC程序中的地址格式進(jìn)行解碼以及幀轉(zhuǎn)化處理。并對(duì)上位機(jī)隨機(jī)發(fā)送檢測(cè)不良品停機(jī)位置進(jìn)行整合,保證不良品可以充分停留在工作臺(tái)上
六、現(xiàn)場(chǎng)圖片和視頻:
收放卷張力控制:
收放卷張力控制視頻
視覺(jué)配合停機(jī)檢測(cè):
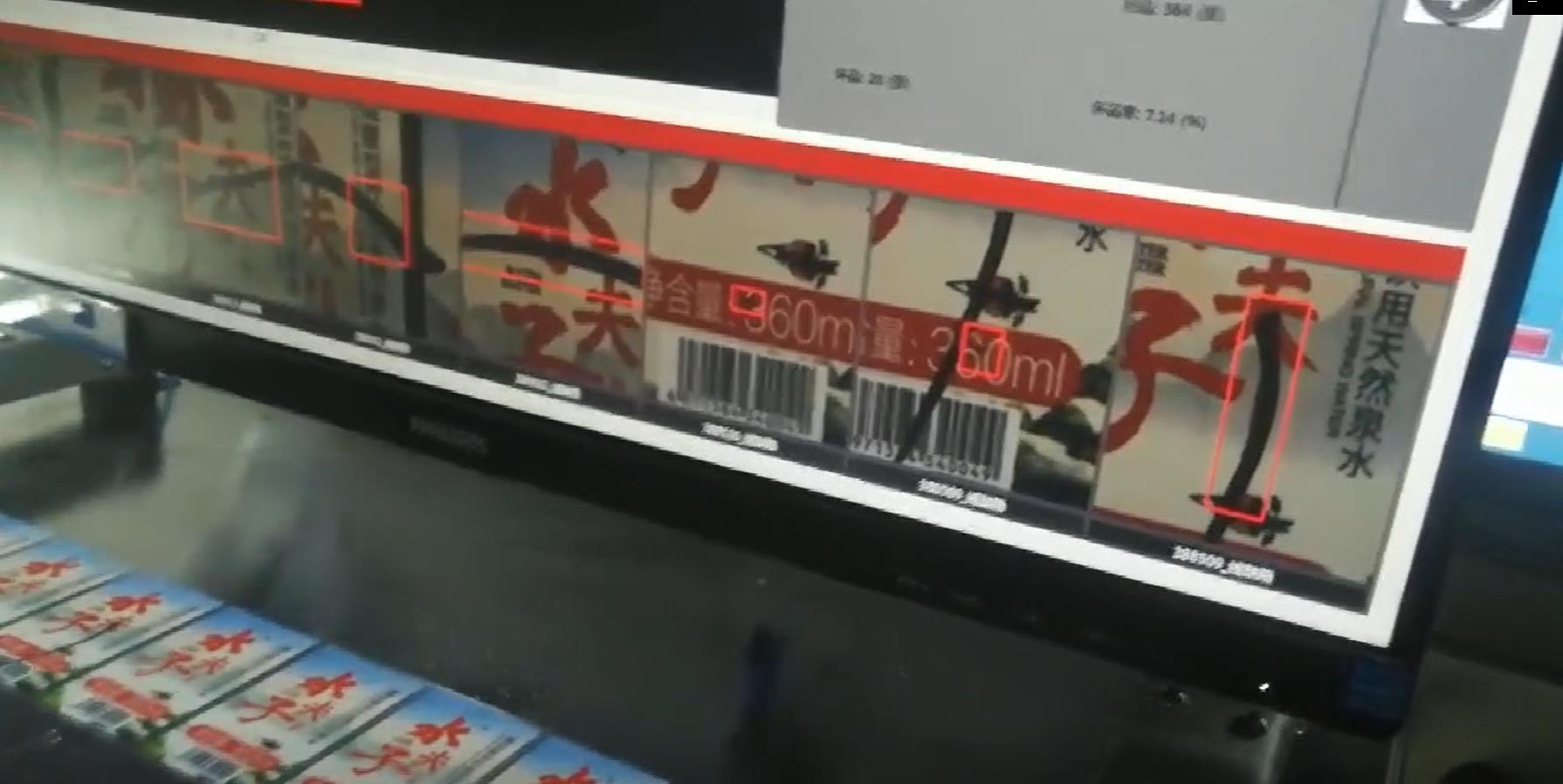

視覺(jué)配合停機(jī)檢測(cè)視頻
七、關(guān)于后續(xù)客戶(hù)使用效果說(shuō)明:
(一)效率說(shuō)明:
客戶(hù)要求無(wú)視覺(jué)檢測(cè)線速度可達(dá)150m/分,有視覺(jué)檢測(cè)速度可達(dá)120m/分,采用匯川伺服基于Canlink通訊控制的情況下,對(duì)速度的控制方式為直接定義伺服轉(zhuǎn)速,所以避免了傳統(tǒng)基于脈沖控制,脈沖輸出頻率不足導(dǎo)致無(wú)法提升效率,以及過(guò)小脈沖數(shù)導(dǎo)致定位細(xì)分不準(zhǔn)導(dǎo)致定位誤差的情況出現(xiàn)
(二)效果說(shuō)明:
該視覺(jué)檢測(cè)卷繞機(jī)針對(duì)標(biāo)簽的不良檢測(cè)穩(wěn)定效果率不僅僅體現(xiàn)在視覺(jué)系統(tǒng)的檢測(cè)機(jī)構(gòu),對(duì)于視覺(jué)系統(tǒng)檢測(cè)的不良品誤差不僅要求準(zhǔn)確停在操作臺(tái)上方便人工進(jìn)行換料,也要保證在停止完成時(shí)收放卷張力穩(wěn)定不出現(xiàn)材料變形的情況,針對(duì)匯川伺服在客戶(hù)高速120m/分鐘的表現(xiàn)來(lái)看,不僅對(duì)連續(xù)視覺(jué)檢測(cè)給定不良品誤差以及隨機(jī)給定不良品誤差,在經(jīng)過(guò)9米的緩沖機(jī)構(gòu),仍能保證不良標(biāo)簽準(zhǔn)確定位,滿(mǎn)足客戶(hù)的要求
(三)穩(wěn)定說(shuō)明:
該視覺(jué)系統(tǒng)的工作原理為收放卷動(dòng)作,所以針對(duì)穩(wěn)定性,客戶(hù)提出除收放卷無(wú)料導(dǎo)致需要停機(jī)以外,其余狀況盡量減少停機(jī)時(shí)間,使用匯川伺服的情況下,即便收放卷卷經(jīng)變化較大(直徑變化半米),也沒(méi)有出現(xiàn)由于過(guò)大轉(zhuǎn)矩出現(xiàn)伺服超載報(bào)警等問(wèn)題
(四)一體化說(shuō)明:
采用匯川H3uPLC自帶以太網(wǎng)口,與上位機(jī)視覺(jué)系統(tǒng)進(jìn)行數(shù)據(jù)交互,避免了傳統(tǒng)采用io的性質(zhì),在生產(chǎn)過(guò)程中,更直觀的反應(yīng)當(dāng)前的數(shù)據(jù)變化,更方便的減少了用戶(hù)的接線流程。