摘 要 在直進式拉絲機控制中采用變頻調(diào)速具有配置簡練、邏輯清晰、成本下降的特點,同時本文還詳細介紹了匯川MD320變頻器在拉絲機上的應(yīng)用。
關(guān)鍵詞 直進式拉絲機 同步 變頻控制
1 前言
金屬制品是冶金工業(yè)中的重要一環(huán),但在我國該行業(yè)卻是一個薄弱環(huán)節(jié),機械、電氣設(shè)備陳舊,阻礙了行業(yè)的發(fā)展。在金屬加工中,直進式拉絲機是常見的一種,在 以前通常都采用直流發(fā)電機-電動機組(F-D系統(tǒng))來實現(xiàn),現(xiàn)在隨著工藝技術(shù)的進步和變頻器的大量普及,變頻控制開始在直進式拉絲機中大量使用,并可通過 PLC來實現(xiàn)拉拔品種設(shè)定、操作自動化、生產(chǎn)過程控制、實時閉環(huán)控制、自動計米等功能。
采用變頻調(diào)速系統(tǒng)的直進式拉絲機技術(shù)先進、節(jié)能顯著,調(diào)速范圍在正常工作時為30:1,同時在5%的額定轉(zhuǎn)速時能提供超過1.5倍的額定轉(zhuǎn)矩。
本文以某廠生產(chǎn)不銹鋼絲的直進式拉絲機變頻改造為例,來說明變頻控制的應(yīng)用過程及效果。
2 直進式拉絲機變頻控制系統(tǒng)
該直進式拉絲機主要對精軋出來的不銹鋼絲進行牽伸,設(shè)計的工藝要求為:(1)最高拉絲速度600m/min;(2)加工品種主要三種,分別是進線2.8mm→出線1.2mm、2.5mm→1.0mm、2.0mm→0.8mm;(3)緊急停車斷頭不多于2個。
直進式拉絲機是拉絲機中最難控制的一種,由于它是多臺電機同時對金屬絲進行拉伸,作業(yè)的效率很高。不象以前經(jīng)常遇到的水箱拉絲機和活套式拉絲機,允許金屬 絲在各道模具之間打滑。同時它對電機的同步性以及動態(tài)響應(yīng)的快速性都有較高的要求。由于不銹鋼材料特性比較脆,缺少像高碳鋼絲或者鋼簾線那樣的韌性,比較 容易在作業(yè)過程中拉斷。
本系統(tǒng)共有8臺11KW變頻器。系統(tǒng)的電氣配置為活套一臺,安裝在第一級,作用是將成卷的不銹鋼絲牽引到拉絲部分,由于活套可以自由打滑,因此這臺電機不 需要特別的控制。拉絲部分共有六個直徑400mm的轉(zhuǎn)鼓。每個轉(zhuǎn)鼓之間安裝有用于檢測位置的氣缸擺臂,采用位移傳感器可以檢測出擺臂的位置,當(dāng)絲拉得緊的 時候,絲會在擺臂的氣缸上面產(chǎn)生壓力使得擺臂下移。最終是收卷電機,該部分采用自行滑動的錐形支架,整個過程卷徑基本不變化,因此不需要用到卷徑計算功 能。八臺電機功率采用變頻專用電機,同時帶有機械制動裝置。
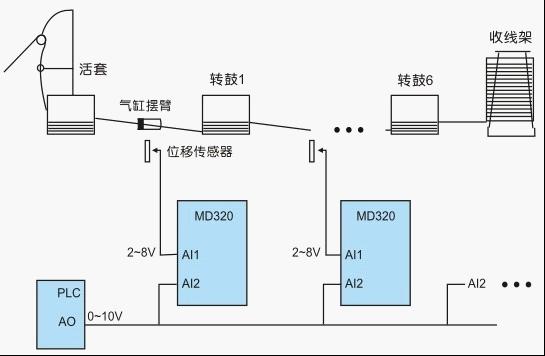
圖一 直進式拉絲機控制示意
直進式拉絲機的系統(tǒng)邏輯控制較為復(fù)雜,有各種聯(lián)動關(guān)系,由PLC實現(xiàn)。同步方面的控制則全部在匯川MD320變頻器內(nèi)部實現(xiàn),不依賴外部控制。
其工作原理是:根據(jù)操作工在面板設(shè)定決定作業(yè)的速度,該速度的模擬信號進入PLC,PLC考慮加減速度的時間之后按照一定的斜率輸出該模擬信號。這樣做的 目的主要是滿足點動、穿絲等一些作業(yè)的需要。PLC輸出的模擬電壓信號同時接到所有變頻器的AI2(AI1也可以)輸入端,作為速度的主給定信號。各擺臂 位移傳感器的信號接入到對應(yīng)的轉(zhuǎn)鼓驅(qū)動變頻器作為PID控制的反饋信號。根據(jù)擺臂在中間的位置,自己設(shè)定一個PID的給定值。這個系統(tǒng)是非常典型的帶前饋 的PID控制系統(tǒng),一級串一級,PID作為微調(diào)量。
之所以選擇匯川MD320變頻器,就在于它能輕松實現(xiàn)主速度跟隨加PID微調(diào)的功能,而無須額外的控制板。在本系統(tǒng)中參數(shù)設(shè)置如下:
F0-03=2:主頻率源X為AI2
F0-04=8:輔助頻率源Y為PID
F0-07=1:頻率源選擇為主頻率源X+輔助頻率源Y
FA-00=0:PID給定源為數(shù)字鍵盤給定
FA-01=4:PID的設(shè)定值(該值的基準值為系統(tǒng)的反饋量)
FA-02=0:PID的反饋值A(chǔ)I1
FA-03=0:PID的作用方向(當(dāng)反饋信號大于PID的給定時,要求變頻器頻率輸出下降,才能達到PID平衡)
FA-05=25:PID的P值
FA-06=1:PID的I值
FA-07=0.08:PID的D值
FA-08=0.1:PID?的采樣周期
FA-09=0:PID的偏差極限
由于系統(tǒng)的穩(wěn)定在很大程度上取決于PID作用,因此對其參數(shù)的整定必須考慮周全,在低速、高速、升速和降速等情況都予以考慮。另外在本系統(tǒng)中必須加入微分限幅。
圖二所示為PID控制原理:
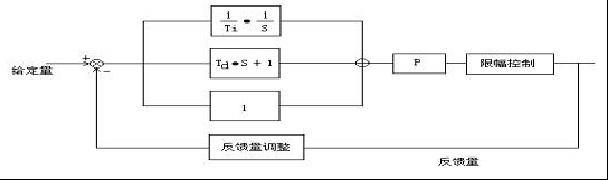
圖二 過程PID控制原理
3 結(jié)束語
本系統(tǒng)在優(yōu)化參數(shù)值之后,設(shè)備試機時速度600米/min非常穩(wěn)定,完全解決了原來采用同步板高速度下面不穩(wěn)的問題(原來只能開到300米/min)。通 過各種工況下的對比測試,和采用進口直流驅(qū)動器的拉絲機性能一樣,同時設(shè)備效率為90-95%、節(jié)電率為40%左右。而且本系統(tǒng)電氣器件配置簡練、邏輯清 晰,成本與原來相比還有較大的降低,的確是個性價比優(yōu)良的方案